In the quest to make roads safer for autonomous vehicles, researchers are turning to an unlikely ally: the humble bicycle. A recent study published in the Journal of the Japan Society of Mechanical Engineers (Nihon Kikai Gakkai ronbunshu) by Ryo Wakisaka of the Toyota Technical Development Corporation is shedding new light on how bicycle simulators can be used to improve the design of autonomous driving systems. The research focuses on enhancing the reproducibility of bicycle behavior in simulators, a critical step in developing accurate cyclist behavior models.
Bicycles, while seemingly simple, present a complex challenge for autonomous vehicle systems. “The behavior prediction of bicycles is a critical issue for the design of autonomous driving systems,” Wakisaka explains. “Effective simulations incorporating bicycles require models that can accurately represent cyclist behavior.” However, collecting extensive ride data from actual bicycles is notoriously difficult, which is where bicycle simulators come into play.
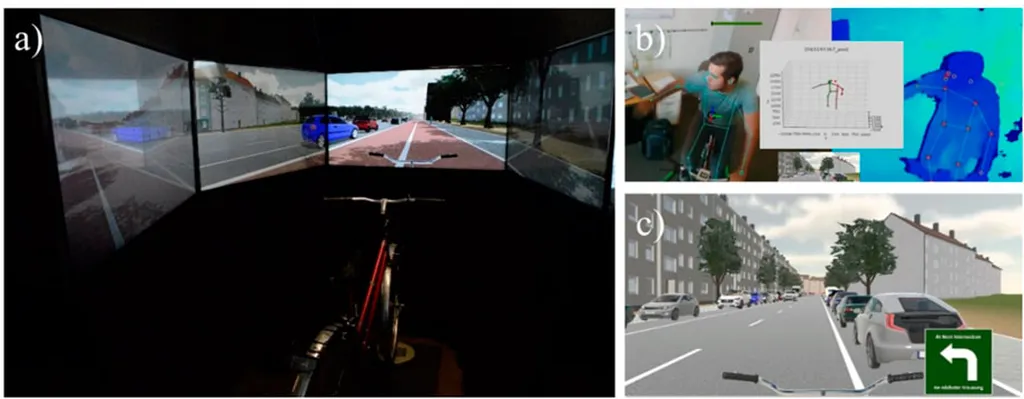
Wakisaka’s research addresses this challenge head-on. By using a motion capture system to gather actual riding data, the team performed parameter estimation for each cyclist individually, accounting for the dominant weight ratio of the cyclist in the bicycle-cyclist system. This personalized approach ensures that the simulator can accurately replicate the unique behaviors of different riders.
But the innovation doesn’t stop there. To further enhance the realism of the simulator, Wakisaka and his team developed a model designed to reproduce the wobbling phenomenon—a subtle but crucial aspect of bicycle behavior. “Replicating the wobbling behavior is essential for capturing the nuances of real-world cycling,” Wakisaka notes. “This model allows us to simulate behavior that more closely reflects actual riding conditions.”
The implications of this research extend beyond just improving bicycle simulators. As autonomous vehicles become more prevalent, the ability to accurately predict and respond to the behavior of all road users, including cyclists, will be paramount. By providing a more realistic and reliable tool for testing and development, this research could significantly enhance the safety and efficiency of autonomous driving systems.
For the energy sector, the potential impacts are equally profound. As cities around the world push for more sustainable and efficient transportation solutions, the integration of bicycles into the urban landscape is likely to increase. Autonomous vehicles that can safely and effectively interact with cyclists will be a key component of this transition. By improving the accuracy of bicycle behavior models, this research could help pave the way for a more harmonious coexistence between different modes of transportation.
Wakisaka’s work is a testament to the power of innovation in addressing complex challenges. By leveraging the capabilities of bicycle simulators, researchers are not only enhancing the safety of autonomous vehicles but also contributing to the broader goals of sustainable and efficient urban mobility. As the field continues to evolve, the insights gained from this research will undoubtedly play a crucial role in shaping the future of transportation.